Njord Project
Build an awesome drone from scratch
組み立て
少し前まで、私たちは全部のドローンの成分を持っていますと発表しました。最近、ドローンを組み立てました。然し、期待な結末を得ませんでした。この記事は結末を紹介して、立場の分析をします。
立場
上述したように私たちが全部の成分を組み立てました。回路に成分を溶接して、接着剤でモーターの固定具を貼りました。
下には、結末の写真です。
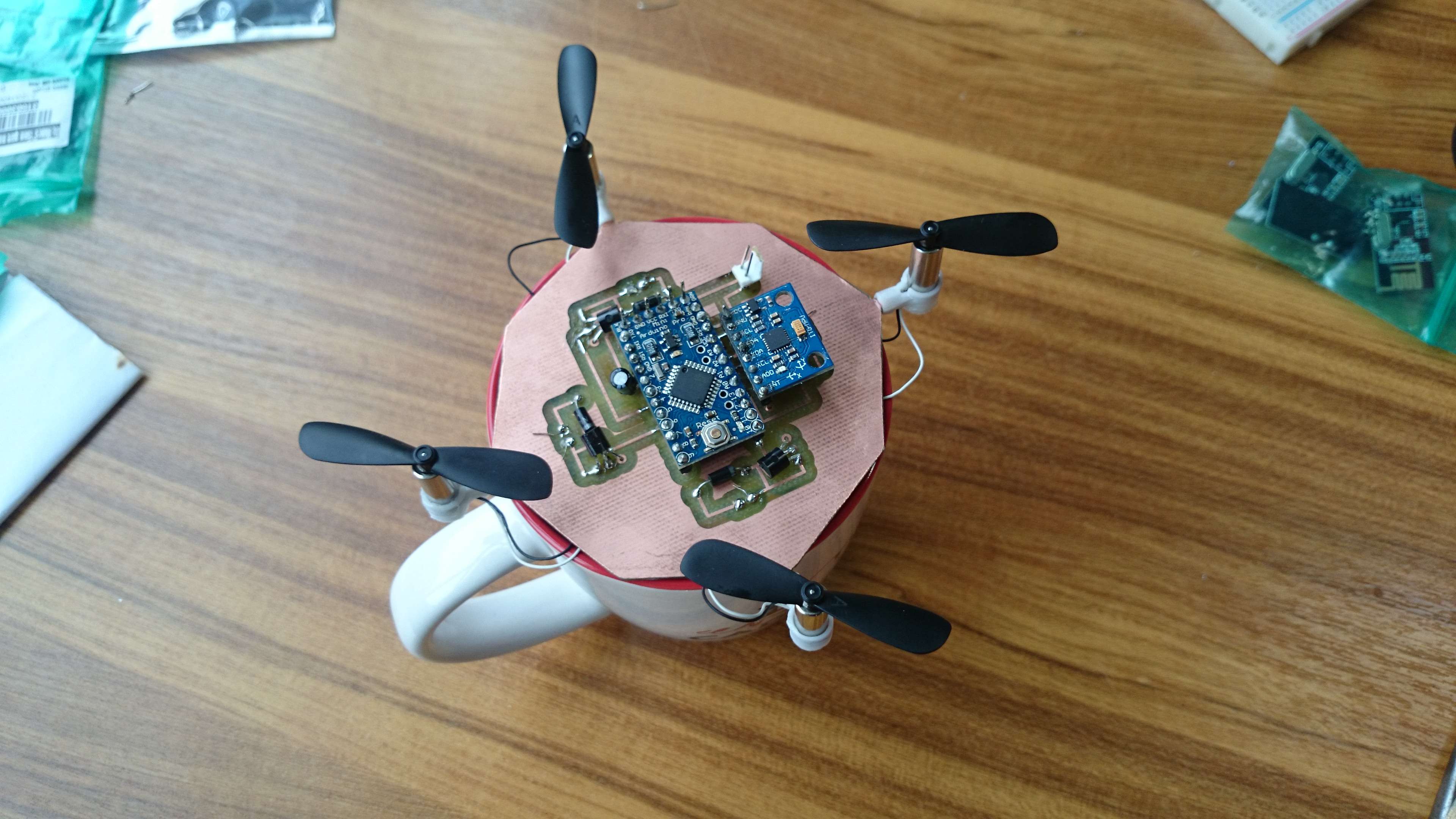
組み立てた後、モーターの行いのテストの簡単なコードを書きました。そして、全速でモーターを行ってみましたけど、足りません。この時、問題を確認しました。モーターに255の値(Arduinoが最大値を供給できます)を供給したら、モーターは最大容量で行いません。今、問題の原因が分かりません。
さらに、回路を受け取った時、とても重いと思いました。実は、私たちはドローンが飛ぶ事が出来るかと思いました。実際に重過ぎるから、出来ません。私たちが仕様をした時、回路の重さを過小評価したらしい。回路の重さが分かりませんけど、目測で回路が最も重い成分なのに、仕様をした時、全部のコンポーネントの重さの合計に10%を加えてドローンの重さを予想してみました。
後で、電池にモーターを直接に接続しました。今度、モーターが最大容量で行いますけど、一台のモーター、他より遅く回ります。だから、ドローンは飛ぶのではなく、回ります。でも、殆ど飛ぶ事が出来るらしい。
然し、飛んでも、Arduinoがモーターを供給しませんから、私たちは速さを制御出来ません。
電池へモーターを直接に接続したら、動くドローンのヴィデオです。
今からどうしますか?
始めに、上述した二つの問題の原因を確定して、解決します。
もし、四台のモーターを同じ速さで最Arduinoから最大容量で(だから、速さを制御出来る)行いさせますと、次の試作品に考えます。
然し、プロジェクトの期限はたちまち近づきますから(1ヶ月以下)、多分他の試作品を組み立てるのが時間が足りません。でも、次のドローンの仕様に考える事が出来ます。
さらに、プロジェクトのプレゼンテーションもたちまち続きます(2週間以下)。今、私たちはドローンのデータから地形を描く事が出来るサーバーがあります。飛ばないドローンを代わる為に、クラスのARDroneを使う事が出来ます。このドローンは、自分で位置や、ドローンとしたにある物の間の長さを確定出来ます。もし、このデータを得る事が出来ますと、サーバーに送ってもいいです。
然し、クラスのARDroneは少し古くて擦り切れたから、安定をあまり出来ません。
後日、ARDroneのデータを得てみて、プレゼンテーションで飛ぶ事が出来るかをチェックします。